
销售热线
主营:欧姆龙,三菱,安川,Pro-face
人机互动的接触
传统的工业机器人,通常使用安全监控停止以及速度分离监控等手段,从时间和空间两个维度,将操作人员和机器人进行安全隔离。
如果在同一时间和空间内,操作人员与机器人依然具有互动的需求,便可能产生直接的物理接触。
这些物理接触,特别是其中的非预期接触,例如碰撞、冲击、挤压等等,都可能对操作人员产生直接的伤害。

人机互动时可能产生物理接触
物理接触类型
机器人系统的运动部件与人体区域之间可能的接触有两种不同的类型。
- 准静态接触:一般属于夹紧或挤压情况。在这种情况下,机器人系统会对受困身体部位施加一段时间的压力。
- 瞬时接触:这也被称为“动态碰撞”。人的身体部位受到机器人系统的运动部件的冲击,这种类型的实际接触时间短,不会造成身体部位被夹住或俘获。
瞬时接触取决于机器人惯性,人体部位的惯性,以及两者的相对速度的组合。

人机的物理接触
压强与力量限制
人机直接互动中物理接触的安全保护,在ISO/TS 15066中有了全新的定义。
现在通过机器人本质安全的手段,基于安全相关的控制系统,如果能将机器人系统的压强与力量控制在风险评估期间确定的允许范围内,便能实现风险的降低。
ISO/TS 15066基于生物力学的研究和测试结果,根据人体不同的部位,定义了准静态接触和瞬态接触的阈值,提供了机器人制造商与集成商,尤其是协作型机器人供应商一个安全指导纲领。

压强与力量限制表
皮尔磁依照ISO/TS 15066标准的身体区域模型,开发了适用于协作型机器人的碰撞测量系统PROBms。
PROBms主要用在验证人机协作时的碰撞极限值,并记录会导致发生潜在碰撞的力和压强:
- 力的测量
碰撞测量装置包括弹簧和传感器,用以测量施加在人体上的力。
九只不同的弹簧分别具有不同的弹性系数,可在力测量中用于模拟各个身体区域。
- 压强的测量
压敏感应纸用于测量局部压强并将其同相关标准中规定的极限值进行比较。
您可使用皮尔磁专属软件工具对力测量值进行评估和数字化处理,并生成报告,简单便捷。
特性一览
1、对压强与力量的测量符合行业标准
2、产品小巧轻便,使用简单
3、用于简化评估、可视化和记录的软件
4、长效使用寿命
5、可根据环境条件灵活调整
6、标准化测量方法

赵斌安科瑞电气股份有限公司上海嘉定摘要:安科瑞剩余电流式电气火灾监控系统通过ARCM剩余电流式电气火灾监控装置或数字型剩余电流互感器,对商场、宾馆、机场、银行、医院、厂房等建筑低压配电系统进行电气火灾
本期上海研强小编给大家分享的是工业计算机在智能电子公交站牌中的应用,希望看完本篇文章您能对工业计算机有一个全新的认识!系统概述: 随着时代的进步,公共交通设施也随之改善。当今的智能电子公交站牌融合大
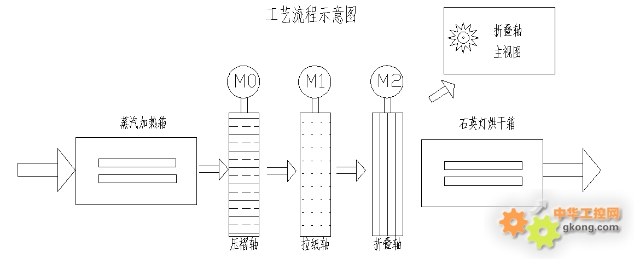
一、简介滤芯折纸机械用于加工各种汽车空调过滤器、汽油过滤器的纸张折叠,该设备操作简单,折叠速度快。该设备还配备有纸张加湿和烘干工艺保证纸张的韧性,对纸张质量要求低。操作员还可以自由设定折数,计数达到

讯记公司此次智能交通卡口高清视频抓拍系统应用中采用百兆、千兆工业交换机混合连接的方式,型号:CK1041和CK3044两种产品配套使用。讯记工业交换机采用高强度IP40防护外壳, 工业级EMC设计,

捻线机是将多股细纱捻成一股的纺织机械设备,作用是将纱合并后股纱制品加工成线型制品,供织造和针织用线。捻线机适用于棉纱,棉,化纤纤维、缝纫线,真丝,玻璃纤维等加捻、合股工程。本次介绍的应用场合是主要设
塑料加工机械的需求日趋增多。设备制造商面临着巨大的挑战:需要设计新的解决方案,以提高产量,更需要满足控制精度和灵活性方面提出的新要求。与此同时,更需要承担减少运行费用和前期投资所带来的巨大压力。依
安科瑞 华梅超上海复旦高等艺术实训基地是上海视觉艺术学院在上海市松江区建设的一所教学基地。上海视觉艺术学院现为上海市教育委员会重点民办艺术类本科院校,是一所专门从事传播研究和设计研究的高等艺术院校。
项目介绍:台北捷运正计划建立一个从淡水到新店的监视系统,这需要强大可靠的计算机、工业以太网交换机和IP摄像头的紧密结合。系统需求:高性能的视频录制和播放系统 EN 50155认证,可靠的存储功能,抗


