
销售热线
主营:欧姆龙,三菱,安川,Pro-face
智能手机组装的贴装工艺中,由于辅料种类多,大小不一,贴装精度要求高,采用众为兴“FR5215吊装式SCARA+AVS视觉系统”解决了产线上自动化柔性辅料贴装问题,其重复定位精度达到±0.01mm,最大负载5KG。
多种辅料贴装,如何化繁为简?
而近期,众为兴更是将飞拍技术成功引入到此类系统,在确保精度的同时,效率做到有效提升。
项目概述
高效精准柔性自动上料机构(橡皮泥供料器+屏蔽盖料盆机)、自动贴装多工位平台(机械手+多套视觉系统),再加上一块下料流水板,构成了该自动贴装生产平台。
整个项目的取放料工艺流程分为五步:
1.取料:机械手从供料器上吸取橡皮泥,然后再运行到料盆机位置进行码垛拍照取料;
2.纠偏:机械手到达倒装相机上方进行飞拍;
3.放料:将橡皮泥贴到PCB板上;
4.检测:采用上相机再次定位橡皮泥放料状况;
5.盖上屏蔽盖。
其中机械手采用众为兴AR6520 SCARA机器人,负载 2-3 kg,工作半径 450 mm;夹具有6个吸嘴,方便扩展;在该工艺最终应用时,纠偏后的放料重复定位精度达到±0.05 mm。
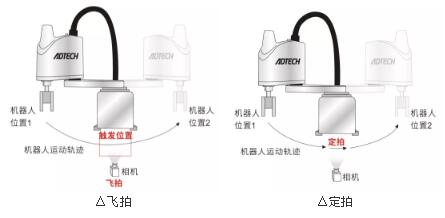
关于飞拍
上述项目中,采用了众为兴AVS视觉定位系统,加入了飞拍技术,不同于定拍,当被抓取的工件经过相机上方的时候,不再需要停下来进行拍照,而是直接在机器人运动着的时候拍照,并将其瞬间位置、姿态的信息进行反馈,对可能产生的工件偏移,进行二次修正纠偏处理。
如何做到飞拍?
“当机器人运动到拍照点区域,其内部算法会利用高速IO信号触发相机,进行动态无停顿拍照,同时对实际拍照位置进行高速锁存。再利用相机回传的位置数据和机器人高速锁存位置,即可实现位置纠偏。”
技术要点
Q 在无外部传感器情况下,如何在合适位置触发拍照?
A 利用了众为兴驱控一体的自身技术优势,通过实时位置来感知拍照区域。
Q 在连续轨迹运动过程中,如何对依次经过视场范围内的多个工件进行检测?
A 只需要根据不同位置的工件示教不同的飞拍点,并对各飞拍点设定视觉模板,调整曝光等模板参数,最后将所有视觉数据一次性回传给机器人,降低了接收数据的复杂程度。这也最大化凸显了众为兴飞拍方案的优势。
Q 以上介绍是基于众为兴机器人搭配自主研发的AVS视觉控制系统,如果采用第三方视觉也能完成飞拍的功能?
A 只要视觉满足一定帧率要求,并支持IO触发即可。
视觉赋予机器人“看”的能力。飞拍等新的视觉技术得益于众为兴对视觉系统算法的不断迭代优化,让视觉感知、控制理论与视觉处理得到紧密结合,来实现机器人更精密的控制或各种实时操作。
未来,众为兴将继续以智能制造需求为导向,重点研发机器人视觉解决方案,助推制造业转型升级。
工业控制系统,是一类用于工业生产的控制系统的统称,也是国家基础设施的核心,被广泛应用于电力、交通、水利、化工等领域,在和外部联网的情况下极易成为外界渗透攻击的目标,提高网络安全防护能力极为重要。0

称重技术应用背景:由于近几年无人机市场不断扩展。快递无人机、农业无人机、物资投放无人机、送餐无人机等一些无人机应用场合,需要根据承载物体的重量计算航行里程,防止无人机由于电量不足无法返程的情况出现。

康宁环境科技公司是全球最大的汽车尾气过滤器载体生产商。公司开发和生产各种汽车尾气吸收装置,如蜂窝陶瓷。蜂窝陶瓷作为催化金属载体,将直接影响汽车有害气体的排放。公司在生产蜂窝陶瓷时,需要对网格平行度进

实例名称:北京费尔消防技术工程:光柱数字液位显示控制报警系统1、项目概况 北京市费尔消防技术工程公司,主要经营消防系统设计。公司拥有中华人民共和国住房与城乡建设部核发的消防设施工程专业承包壹级资质、
概述: 工业现场传感器与PLC/FCS/DCS、仪器仪表之间输入输出的模拟信号隔离放大器(亦称模拟量隔离变送器)属于模拟信号调理的范畴。模拟信号隔离放大器能有效保护各级控制回路,消除或减弱环境噪声对

数据中心耗能严重一直困扰运营者,但通过调查发现,耗能严重产生的直接原因是:并未对机房热点采取正确降温手段所致,如何正确处理数据中心“热问题”成为运营者需要关注的焦点,本文就数据机房的“热点”问题

【摘要】目前在生产线上的搬运工业机器人大都是通过预先编程,并按固定的路径执行动作,目标物体的初始位置和目标位置都是固定的,机器人只是完成点到点的动作。而对于拾取输送线上位置不确定的物体如面包,

金属工件作为制造业中不可或缺的重要组成部分,其表面瑕疵不但影响美观,更会影响工件的使用性能,使产品安全性降低,由于这些工件表面光滑,同时具有高反光等特性,检测时会影响被测物的特征提取,无论是人工检测


