
销售热线
主营:欧姆龙,三菱,安川,Pro-face
织物疵点的自动化检测是工业自动化视觉检测的一个分支,它是对织物质量进行控制和实现织物生产过程和品质检验的关键环节。本文主要概述在利用机器视觉和数字图像处理技术开发一套织物疵点自动检测系统。
织物表面在高照度、高工作频率荧光灯光源的照射下,通过CCD线阵式相机对织物表面进行扫描获得灰度图像数据,再经有效的识别算法实现疵点的自动检测和评分任务。
织物疵点自动检测系统组成
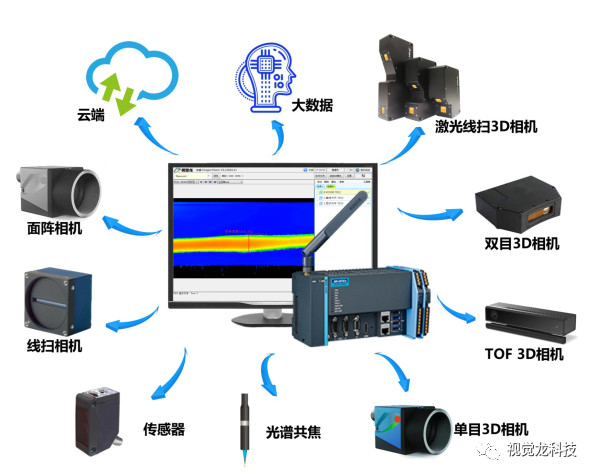
一般而言,基于图像技术的织物疵点的自动检测系统设计可分为六个部分:数据获取、疵点检测、特征抽取、特征分析、疵点分类和文档输出。数据获取部分包括选择可行的照明光源和光电传感器,常用的有面阵式、线阵式扫描CCD相机及激光扫描仪。
一般在图像处理技术上,多采用高性能的CCD相机。照明光源的选择有荧光灯和光纤两种。这一阶段的工作至关重要,可以帮助整个系统获得一个清晰照度均匀的图像,生成系统的原始数据,从而简化下阶段的检测特征提取和分析的算法。其次,整个系统的检测精度从硬件的构成角度上,也往往决定于光电传感器的物物理和光学分辨率。通常考虑到成本因素,这一阶段的工作常常被忽视,导致了后期检测算法的复杂化。
第二阶段的工作是检测织物当中是否包含疵点以及实现疵点的报警,即疵点的识别工作。采用的算法通常有基于像素统计特征的阈值法基于变换的滤波法基于织物纹理特征的分割法和基于织物纹理建模的识别法。
第三阶段的工作是完成疵点特征的抽取,构造特征矢量,利用可能少的模式特征来描述疵点的类别,并且特征的抽取不受疵点大小旋转和位置的变化。所谓的特征抽取,就是对模式的某些物理性质进行数学描述,具体地讲,就是对将原始的数字图像数据进行变换,得到最能反映疵点模式分类的本质特征。一般将原始的数据空间称为测量空间,将进行分类的空间称为特征空间,通过变换将维数较高的测量空间中的模式矢量变换到维数较低的特征空间的模式矢量,从而简化和提高分类的效率。疵点形态特征的抽取大多是通过变换的方法,另一方面,纹理特征的描述也是种重要的特征提取方法,除此以外,还有通过神经网络的方法实现特征的抽取。这一阶段的任务的复杂性取决于所要求分类疵点的种类。
第四阶段主要是分析上一阶段所提取疵点的特征模式,保证特征的可分性、独立性和不变性。
第五阶段是对提取疵点样本特征的学习,实现对疵点的分类。所使用的算法大多为:Bayer决策分类法、基于模糊集的分类和基于神经网络的BP算法、径向及网络算法和自组织的神经网络算法。
最后,是对检测出的疵点及其分类标记的文档输出和数据管理工作。便于今后对疵点的进一步分析和对疵点成因及工艺的改进工作。
系统的设计必须考虑到系统的成本、识别的精确度、检测的速度等问题。每个部分并不是单独设计的,一个有效、合理的设计方案是每个部分近乎优化的设计组合。西安获德作为国内玻纤行业检测的引领者,多年来利用其技术优势,成功帮助多家著名玻纤企业进行了系统化设备改造,出色的性能和稳定性,得到企业高度赞扬。

中国人口基数大、老龄化程度高,骨科疾病已成为现代社会的常见病和多发病。而骨科手术难度大、医资不足等问题使得人们对完成高效、安全的骨科手术需求不断提高,迫切需要引入机器人辅助治疗,骨科手术机器人发展

人机互动的接触 传统的工业机器人,通常使用安全监控停止以及速度分离监控等手段,从时间和空间两个维度,将操作人员和机器人进行安全隔离。 如果在同一时间和空间内,操作人员与机器人依然具有互动的需求

应用领域: 航空研究 使用的产品: CompactRIO, LabVIEW 挑战: 开发一个有自动飞行功能的直升机平台,作为大学控制和导航研究之用。 应用方案:使用 NI LabVIEW和Compa
-光伏视觉排版机- 排版机是对光伏组件传输,排版定位的设备。通过视觉定位将串焊机焊好的电池串,按工艺尺寸要求和排版方向顺序自动排版组成电池串阵列。本方案采用龙睿智能相机的专用型与机器人或模组配合,通

中达电通股份有限公司 解 刚摘 要:本文主要介绍高速牙刷植毛机的性能需求,以及台达ASDA-B系列伺服在此设备上的应用。关键词:植毛机 伺服 台达 共振抑制 变频器1 引言 现代社会牙齿已成为健康

一.门机起重设备的特殊性:门机起重设备的安全性要求越来越突出,安全第一的概念在控制中越来越重要,按照规定,40米以上的大跨径门机必须加装双轨同步纠偏控制,以防止左右双轨的门机轮子超偏而啃轨甚至脱轨的

产品质量是企业生存和发展之本,产品质量管理系统作为产品出厂最后一道关口,对保证产品质量起着至关重要的作用,本文主要介绍基于紫金桥组态软件平台和关系数据库构建产品质量跟踪管理系统的方法和过程。整个系
一、 引言随着国内经济的飞速发展,人们出行在外应用出租车和公交车等交通工具是必不可少的,然而运输管理的的成本也是成为了现在客运公司考虑的首要问题,为了提高工作效率以及服务水平,这需要企业能够及时、准


