
销售热线
主营:欧姆龙,三菱,安川,Pro-face
关键:数控系统 台达伺服系统 项目集成
Abstract:It is discussed to the project integration for steel rolling chiselling flower machine in this paper. And also it is introduced to the application of DELTA servo system and numerical control system H4 in the steel rolling chiselling flower machine. Finally from the hierarchy of application it is explained in detail to parameter assort between servo and numerical control system.
Key Words:Numerical control system DELTA servo system Project integration
中图分类号] TP273 [文献标识码] B 文章编号
1 引 言
随着科学技术的发展,现代制造业对机械加工提出了愈来愈高的要求,数控技术在机械加工行业的应用越来越广泛.生产的发展使许多原有的机械设备在生产和加工过程中越来越无法满足人们对高精度高效率的要求,反过来又促进了数控系统技术在机械加工行业的大面积使用,使数控技术在机械制造行业里的受众率大大提高。本文结合基于台达伺服DELTA-ASDA的H4-M数控系统在钢辊刻花机上的应用, 对加工控制相关技术工艺和技术关键点作简要讨论. 众所周知, 钢辊刻花机是轧钢厂最主要的辅助加工设备之一,与文中讨论控制方案配套的是飞刀式钢辊刻花机(机械结构上含有摆头刻字刀), 这种刻花机已经在首钢,包钢和通钢等大中型钢厂里使用, 它较以往单摆头式的钢辊刻花机, 加工效率和加工精度都有大幅度的提高, 以前使用摆头式的加工一个辊槽需要30min, 而使用飞刀式的仅仅需要20min, 从而使加工效率提高了三分之一. 基与以上的优点, 显然基于DELTA-ASDA台达伺服的H4-M系统的控制方案在轧钢辊雕刻机上一定会有广阔的应用空间.
2控制系统结构
轧钢辊刻花机控制系统结构如图1 所示, 它由以下部分组成:台达伺服DELTA-ASDA, 意图数控系统PUTNC-H4-M,台达M TAPE变频器和意图手摇轮PUMPG-BA4SI等组成.

图1 控制系统结构框图
3 技术要求和工艺说明
轧钢辊雕刻机如图2所示。客户实际是使用五轴控制加工飞刀、刻子摆头和工件夹头对螺纹钢轧钢辊进行刻花刻字, 其中各轴的命名以及功能:X轴, 控制飞刀刻花深度的横向进给轴; Y轴, 控制工件夹头按指令进行旋转的旋转轴; Z轴,控制刻字摆头的旋转轴; A轴, 控制飞刀按指令旋转的刻花的旋转轴; B轴, 控制飞刀纵向移动跳槽的进给轴。
各轴的具体机械运动以及伺服功率:X、B轴为直线运动轴, 使用螺距为6mm的滚珠丝杆且伺服电机的连接都为直连方式,X轴是由系统控制的可以按照指令运动而且,电机功率为1.5kW.B轴是由一个手摇控制的,伺服采用的是位置控制模式利用多个齿轮比进行速度切换,可以说是一个脱离系统以外的单独轴;Y、A、Z轴的旋转轴减数比分别为72:1,2:1,1:1,由系统自动进行控制而与手摇无关,其电机功率分别为3kW,2kW,1.5kW, 编码器脉冲倍率都设为2倍, 而不是通常的4倍。

图2 轧钢辊雕刻机
4 数控及伺服系统相关参数
关于数控及伺服系统的工作原理比较简单,不必多述,这里仅给出数控及伺服系统操作运行时的相关参数,系统参数设置的类似界面如图3所示。

图3系统参数设置界面
(1)数控系统参数
1)关于各轴的基础参数
0118: 00000005 X轴电子齿轮比分母(根据机械减数比设定)
0119: 00000003 X轴电子齿轮比分子
0120: 00000375 Y轴电子齿轮比分母
0121: 00000360 Y轴电子齿轮比分子
0122: 00002500 Z轴电子齿轮比分母
0123: 00006000 Z轴电子齿轮比分子
0124: 00000001 A轴电子齿轮比分母
0125: 00000036 A轴电子齿轮比分子
0160: 00000004 X马达反馈编码器脉冲倍率值
0161: 00000002 Y马达反馈编码器脉冲倍率值
0162: 00000002 Z马达反馈编码器脉冲倍率值
0163: 00000002 A马达反馈编码器脉冲倍率值
0253: 00000000 X为0是直线轴,为1是旋转轴
0254: 00000001 Y为0是直线轴,为1是旋转轴
0255: 00000001 Z为0是直线轴,为1是旋转轴
0256: 00000001 A为0是直线轴,为1是旋转轴
2)有关Y、A轴回原点速度的参数
0136: 00002000 X回机械原点的第一段速度(mm/min)
0139: 00001500 A回机械原点的第一段速度(mm/min)
0142: 00000040 X回机械原点时,编码器寻找GRID信号速度(mm/min)
0145: 00000150 A回机械原点时,编码器寻找GRID信号速度(mm/min)
回原点速度有关的参数表明,Y、A轴回原点速度都比较低是因为Y、A轴的机械减数比都比较大,降低回原点速度可以保证回零精度。
(2)伺服系统参数
A轴
P1-01=2, 设定伺服控制模式为速度模式
P2-04=1758, 速度控制增益
P2-06=35, 速度积分补偿
P2-25=8, 共振抑制低通滤波
P2-26=257, 外部干扰抵抗增益
P2-10=101, Servo ON信号常OFF
B轴
P1-00=0,设定伺服接受脉冲命令的型式
P1-01=0,设定伺服控制模式为位置模式
P1-44=5,电子齿轮比分子
P1-45=3,电子齿轮比分母
P2-12=143,切换电子齿轮比, ×10
P2-12=144,切换电子齿轮比,×100
P2-60=50, 第二电子齿轮比分子
P2-61=500,第三电子齿轮比分子
X轴
P1-01=2,设定伺服控制模式为速度模式
P2-04=1318,速度控制增益
P2-06=28,速度积分补偿
P2-25=8, 共振抑制低通滤波
P2-26=301,外部干扰抵抗增益
P2-10=101,Servo ON信号常OFF
Y轴
P1-01=2,设定伺服控制模式为速度模式
P2-04=989,速度控制增益
P2-06=35, 速度积分补偿
P2-25=7, 共振抑制低通滤波
P2-26=237,外部干扰抵抗增益
P2-10=101,Servo ON信号常OFF
Z轴
P1-01=2,设定伺服控制模式为速度模式
P2-04=1570,速度控制增益
P2-06=50,速度积分补偿
P2-25=5,共振抑制低通滤波
P2-26=201,外部干扰抵抗增益
P2-10=101,Servo ON信号常开OFF
以上伺服的增益参数,都是通过使用台达伺服调试软件GAIN.EXE根据不同的JL/JM负载惯量比和不同的响应频宽BW计算出来的。由于电机的功率都很大,对电机的钢性要求很高,所以增益最好都尽量调整的高一些,以满足加工的实际要求。
(3)加工程序简介(G代码程序)
刻花程序如下:
N01 G01 B-175. F100000 (刀至起始点)
N02 G65 L87 P03 A23 B34 (加工循环,起始行03 终止行23 循环次数35次)
N03 G01 X0.05 F100 (进刀)
N04 G65 L87 P05 A06 B45 ( 总槽数+1的一半-6) H4-M数控系统
N05 G01 B-240. Y4.269 F150000 (Y是螺旋分度y)
N06 G01 B-120. Y2.721 F200000 (Y是2倍槽间距- y=y')
N08 G65 L87 P09 A10 B2 (加工循环,起始行09 终止行10 循环次数3次)
N09 G01 B-240. Y4.269 F150000
N10 G01 B-120. Y9.711 F200000(4倍的槽间距-y)
N14 G65 L87 P15 A16 B45 (总槽数-1的一半-5)
N15 G01 B-240. Y4.269 F150000
N16 G01 B-120. Y2.721 F200000
N18 G65 L87 P19 A20 B1 (加工循环,起始行19 终止行20 循环次数2次)
N19 G01 B-240. Y4.269 F150000
N20 G01 B-120. Y9.711 F200000
N22 G01 B-240. Y4.269 F150000
N23 G01 B-120. Y2.751F200000 (y'+累积误差)
N26 M30 (程序结束)
5 结束语
以上从使用角度简要讨论了H4-M数控系统结合DELTA-ASDA台达伺服在轧钢辊雕刻机上的应用方案,它较以往单摆头式的钢辊刻花机,加工精度有大幅度的提高,加工效率提高了三分之一,是一种值得推广的 应用方案。
参考文献[略]
作者简介
李晓东 男 现供职于台达公司伺服数控产品处。

1地铁能耗分析地铁是大运量的城市轨道交通运输系统,也是耗电量的大户。地铁运营过程中消耗能源的主要形式是电能。根据对地铁用电负荷的统计分析,能耗主要分布在列车牵引用电和各种动力照明设备用电,如通风空调
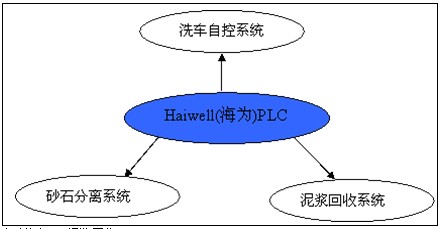
关键字:海为PLC 、 混泥土回收一、摘要:介绍基于海为PLC在混泥土回收系统中的应用。二、系统概述:混泥土回收系统由洗车自控系统、砂石分离系统和泥浆回收系统构成,由PLC集中控制。系统工作流程:混

基于阿尔泰科技嵌入式水质检测系统一、系统检测指标 实时对水中的、铁、锰、PH、含氧在线监测; 数据将实现实时传输于当地的监测部门;二、系统实现原理本系统主要有两层网络构成:现场数据层、协议传输层现场

项目背景 该流体动力公司生产一种压力测试设备,可以连接不同的工件,测试很多不同型号的产品。已有的测试方式都是靠人工来操作,包括的冲水,增压,卸压,排水等,从而造成测试过程不精确不稳定等问题,效率
赵斌11安科瑞电气股份有限公司,上海嘉定201801;摘要:介绍苏州市立医院综合楼(教学楼)电能管理系统,采用智能电力仪表采集配电现场的各种电参量和开关信号。系统采用现场就地组网的方式,组网后通过现场

项目背景:配电系统作为学校正常运行的重要一环,在学校的日常运作中显得尤为重要。电力监控系统实现了配电系统的智能监控过程,很好地帮助用户提高智能变电站中的用电管理水平,很大程度上降低了电力设备运营的成本

行业背景 民以食为天,随着国民经济的发展和人们生活水平的提高,人们对食品工业提出了更高的要求。食品工业也成为国民经济的支柱产业,作为装备食品工业的食品机械工业发展尤为迅猛。虽然食品机械工业发展迅猛,


